하나의 시스템 솔루션 안에서 모션, 로봇 그리고 로직 컨트롤을 제공하는
IndraMotion MLC
보쉬렉스로스

IndraMotionMLC- easy, open and flexible
더 높은 생산성, 뛰어난 유연성, 증가된 이익 -공장 자동화를 만드는 요구사항들은 항상 증가하고 있으며, 이와 함께 오늘날의 자동화 시스템에 요구되는 특징들은 다음과 같다.
· 쉬운 통합성과 사용성
· 개방된 통신 및 어플리케이션
· 다른 어플리케이션 및 방식에 대한 다양성과 유연성 인드라모션 MLC는 통합된 런타임 시스템을 컨트롤 플랫폼이 내장되어 있는 인드라콘트롤L에 제공하며, 혁신적인 인드라웍스 엔지니어링 구조는 일정하고 신뢰할 수 있는 엔지니어링을 위해 새로운 기준들을 제시한다.
인드라모션 MLC 시스템 소프트웨어는 다음의 주요 구 성요소들이 포함되어 있다.
· 로직 컨트롤: IEC 규격을 준수 하는 강력한 PLC 코어 모듈
· 모션 컨트롤: 모션 컨트롤러의 모든 기능들을 위한 고성능 모션 코어 모듈
· 로봇 컨트롤: ready-made kinematics and transformations과 다축 보간을 위한 독자적인 모션 코어 모듈
· 테크놀러지 펑션: 펑션 라이브러리 형태의 광범위한 프로세스 펑션들
강력한 Open system solution의 제공
개방된 인드라모션 MLC 시스템 솔루션은 모션컨트롤, 로봇 컨트롤, 로직 컨트롤을 결합하여 통합되며, 강력한 성능의 컨트롤 구조를 만들어 낸다. 콤팩트한 인드라컨트롤 L 컨트롤 플랫폼과 결합하여, 고객은 고객의 자동화 요구사양(경제적이고 일관되고 알기 쉬운)에 필요한 모든 기능들을 갖추게 된다.
통합된 인드라모션 MLC 런타임 시스템 안에서 모션 컨트롤과 로직 컨트롤을 위한 펑션들은 open PLC 표준 IEC 61131-3을 따르는 어플리케이션 프로그램을 통하여 사용된다.

인드라웍스 엔지니어링 구조는 또한 복잡한 어플리케이션들을 보다 쉽게 만들어 주는 광범위한 펑션 라이브러리들과 알아보기 쉬운 데이터 구조들을 제공한다.
3D 모션 컨트롤을 위해서, 고객은 혁신적인 로봇 컨트롤에 의해 제공된 매우 다양한 어플리케이션들을 위해 사용할 준비가 되어있는 Kinematics and Transformations을 믿고 의지할 수 있다.
더불어, 고성능 모션 코어 모듈은 또한 다축 동기된 모든 어플리케이션 들이 실시간으로 처리되는 것을 보장한다.
이득
· 모션, 로직, 로봇 컨트롤 등을 위해 개방되고 통합된 시스템 구조로 인한 극대화된 성능
· 종속된 모션 코어 모듈과 SERCOS 인터페이스로 인한 드라이브 기능에 극대화된 동기성
· 광범위한 테크놀러지 펑션과 펑션 블록들을 사용한 신속한 수단
· 표준화된 인터페이스와 함께 자동화를 위한 향상된 생산성과 절감된 비용
· 통합되고 유지관리가 필요 없는 구성품들로 인한 투자의 확실성
인드라모션 MLC는 서보드라이버와 동기된 장비들과 공장을 위해 모든 부분이 갖추어진 자동화 시스템이다.

광범위한 펑션 라이브러리들은 매우 다양한 어플리케이션들에 있는 넓은 범위의 시스템 펑션들을 사용하기 쉽게 만들어 준다. 엔지니어들은 이제 단순히 표준화된 PLCopen 모듈들뿐만 아니라 광범위한 모션 컨트롤과 테크놀러지 펑션들을 자유롭게 사용할 수 있게 된다.
이것은 복잡한 장비의 동작 실행을 매우 쉽게 만들고 또한 모듈식의 장비와 컨트롤 콘셉트의 개발을 가능하게 한다. 장비와 플랜트를 위한 새로운 대안들의 개발이 더욱 신속해 진다는 것은 고객들에게 결정적인 시장 우위를 부여해 줄 수 있다. 그 중심에 보쉬렉스로스의 인드라모션 MLC가 있다. 
'제품소개' 카테고리의 다른 글
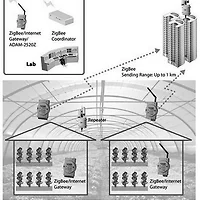
| 현대 온실 모니터링 시스템에 바로 적용 가능한 ADAM-2000 시리즈 (0) | 2013.05.13 |
|---|---|
| 터크(TURCK) 멀티 프로토콜(MultiProtocol) (0) | 2013.05.10 |
| 로크웰 오토메이션 (0) | 2013.05.08 |
| 에머슨 프로세스 매니지먼트 (0) | 2013.05.07 |
| FFIELDVUE Diagnostics를 활용해 마찰력을 줄이고, 전력 감소를 방지하여 274,000 달러를 절약한 원자력발전소 (0) | 2013.05.07 |